8.3神经网络与矩阵计算
神经网络之所以能够独步天下,成为当今最重要的机器学习算法。与它可以将计算转化为高效的矩阵计算密不可分。再加上GPU硬件专门针对矩阵运算进行了优化。让神经网络的训练速度大幅提高,也加快了神经网络的推广。
8.3.1 一个例子
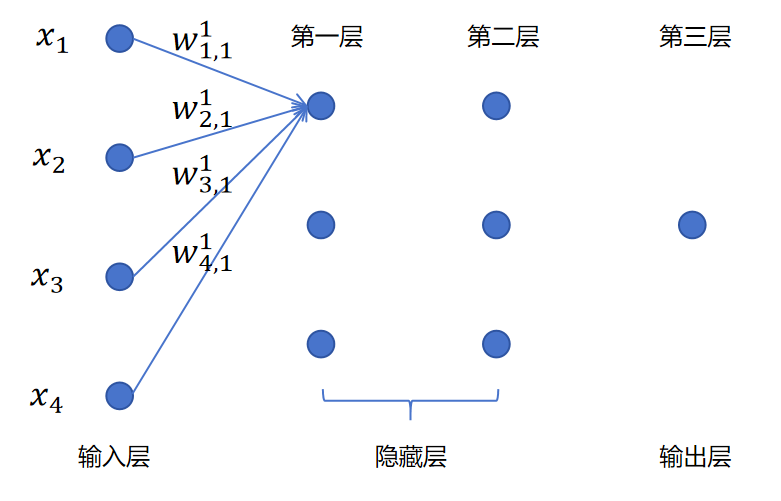
对上图这样一个3层的神经网络。我们关注第一层的第一个神经元的计算。其中x1,x2,x3,x4是一个样本的4个特征值,也就是输入层的输入。
其中w1,11表示一个权重值。上标1,表示这是第一层的参数。下标(1,1),第一个1表示这是针对第一个输入的权重。第二个1表示这是第一层的第1个神经元。所以w1,11表示第一层的第一个神经元对对一个输入的权重参数。
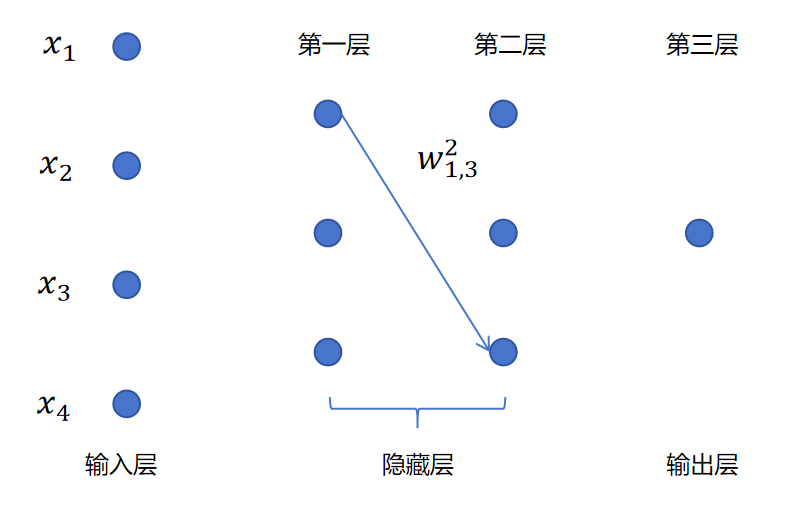
类似的对于w1,32,就表示第2层的第3个神经元对第1个输入的权重参数。如下图所示:
我们回到第一层第一个神经元的线性回归计算,暂时不考虑偏置和激活函数。则它的计算式为:
z11=[x1,x2,x3,x4]⎣⎢⎢⎢⎡w1,11w2,11w3,11w4,11⎦⎥⎥⎥⎤
其中z11表示线性回归的结果,上标1表示第1层,下标1表示第一个神经元。
同理,我们可以得到:
z21=[x1,x2,x3,x4]⎣⎢⎢⎢⎡w1,21w2,21w3,21w4,21⎦⎥⎥⎥⎤
z31=[x1,x2,x3,x4]⎣⎢⎢⎢⎡w1,31w2,31w3,31w4,31⎦⎥⎥⎥⎤
上边是分别对z11,z21,z31进行计算。我们可以换成更高效的矩阵计算方式,对z1一次性进行计算。
z1=[z11,z21,z31]=[x1,x2,x3,x4]⎣⎢⎢⎢⎡w1,11w2,11w3,11w4,11w1,21w2,21w3,21w4,21w1,31w2,31w3,31w4,31⎦⎥⎥⎥⎤
这是对一个样本的4个特征进行计算,我们可以对多个样本进行计算,这样就变成两个矩阵相乘。 x1,2表示第1个样本的第2个特征。
[x11x21x12x22x13x23x14x24]⎣⎢⎢⎢⎡w1,11w2,11w3,11w4,11w1,21w2,21w3,21w4,21w1,31w2,31w3,31w4,31⎦⎥⎥⎥⎤
对于每一层都是类似的,我们可以对批量输入数据和多个神经元的线性回归进行矩阵运算。这大大加速了神经网络的计算,特别是在GPU上。
当我们计算出了z1=[z11,z21,z31]可以给线性回归结果加上偏置值[b11,b21,b31]。b21表示第一层第二个神经元的偏置值。
z1=[z11,z21,z31]+[b11,b21,b31]
然后对每个元素应用sigmoid函数就得到了第1层的激活值:
a1=sigmoid([z11,z21,z31])
接下来a1就成为神经网络第二层的输入,同样第二层的计算也可以用矩阵运算完成。比如:
z2=[z12,z22,z32]=[a11,a21,x31]⎣⎢⎡w1,12w2,12w3,12w1,22w2,22w3,22w1,32w2,32w3,32⎦⎥⎤
在神经网络进行反向传播,计算梯度时,同样可以利用矩阵运算进行加速,后边我们会详细讲解。
8.3.2为什么GPU适合做矩阵运算
GPU与CPU最大的不同是GPU拥有大量的上千个计算核心,这些核心可以同时处理大量简单的计算任务。而矩阵运算本质就是大量相同的操作(如乘法和加法),非常适合并行化。进行矩阵乘法时,每个结果矩阵的元素可以由不同的GPU核心并行进行计算,彼此并不影响。
GPU最初是为了图像处理而设计的,而图像也是一种矩阵(像素的二维矩阵)。GPU天生就优化了对矩阵、向量的处理能力。另外,随着人工智能的兴起,GPU也专门加强了GPU在人工智能领域的计算能力,从硬件层面做出优化,比如Tensor Core,它就是专门为了矩阵乘法设计的硬件单元。