11.9 语义分割
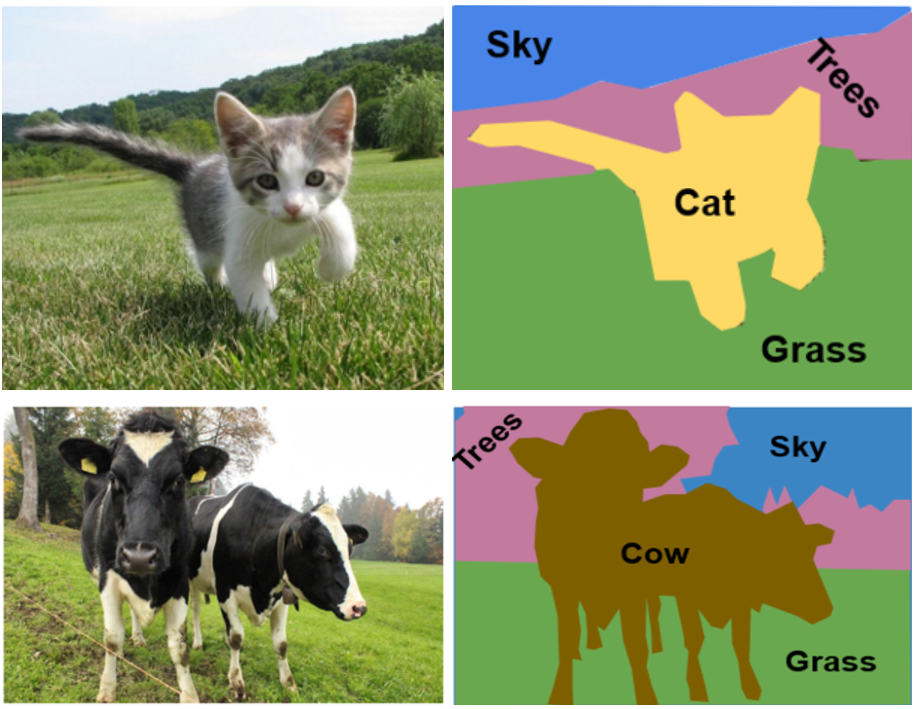
目标检测可以给出图片上目标的边界框。但是在某些情况下这个精度还不够,比如你想从照片中,识别出人像,并且把背景进行虚化。这时候你就需要知道图片中每个像素是人像还是背景。再比如对于卫星遥感照片,需要识别地面上森林的面积,森林的形状是不规则的。这时,就需要能识别遥感照片上每个像素是否属于森林。
这种需要对图片上每个像素都赋予语义信息的任务叫做语义分割(semantic segmentation)。
这一节我们就来了解一下语义分割的基本原理。
11.9.1 语义分割的原理
语义分割任务实际上就是对原始图片上的每一个像素进行多分类。比如我们要对原始图片进行语义分割,其中类别包括:背景,行人,汽车,摩托车。输入的图片特征为224×224×3,那么经过语义分割的神经网络后,输出的特征图高宽应该一样,但是通道数为4,对应要分类的4个类别。所以最终输出的特征图形状为224×224×4。每个像素上都有4个特征,对这4个特征应用softmax,进行4分类,最终给出每个像素的分类值。
主流的语义分割网络都是先利用卷积神经网络对图片进行下采样,得到高级语义特征。然后利用转置卷积将特征图上采样到原始图片大小,再对图像每个像素进行分类。
11.9.2 转置卷积
我们之前讲过的卷积操作,如果不加Padding,卷积核不为1×1,那么经过卷积操作,特征图的高和宽总是会变小。而转置卷积是一种特殊的卷积操作,它可以放大特征图的高和宽。
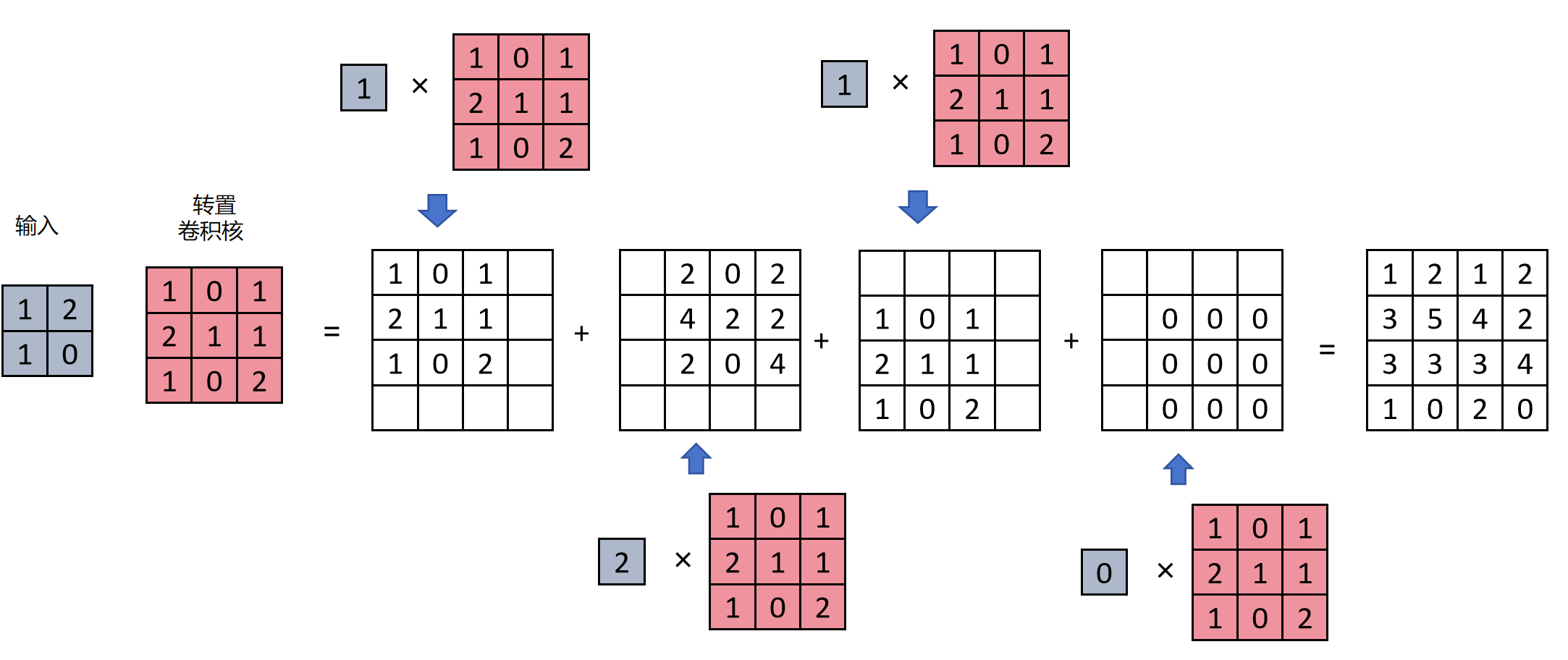
上图是一个转置卷积的计算过程。输入是2×2的特征图,转置卷积核的形状为3×3。进行转置计算时,步长为1。
- 第一步,取出输入特征中左上角第一个元素:1,与卷积核相乘,得到一个矩阵。
- 第二步,取出输入特征中右上角第二个元素:2,与卷积核相乘,因为步长为1,右移一位。
- 第三步,取出输入特征中左下角第三个元素:1,与卷积核相乘,因为步长为1,下移一位。
- 第四步,取出输入特征中右下角第四个元素:0,与卷积核相乘,因为步长为1,右移一位。
- 第五步,将上边四步的矩阵相加,最终得到一个4×4的扩充的特征图。
如果步长为2,则计算过程如下图:
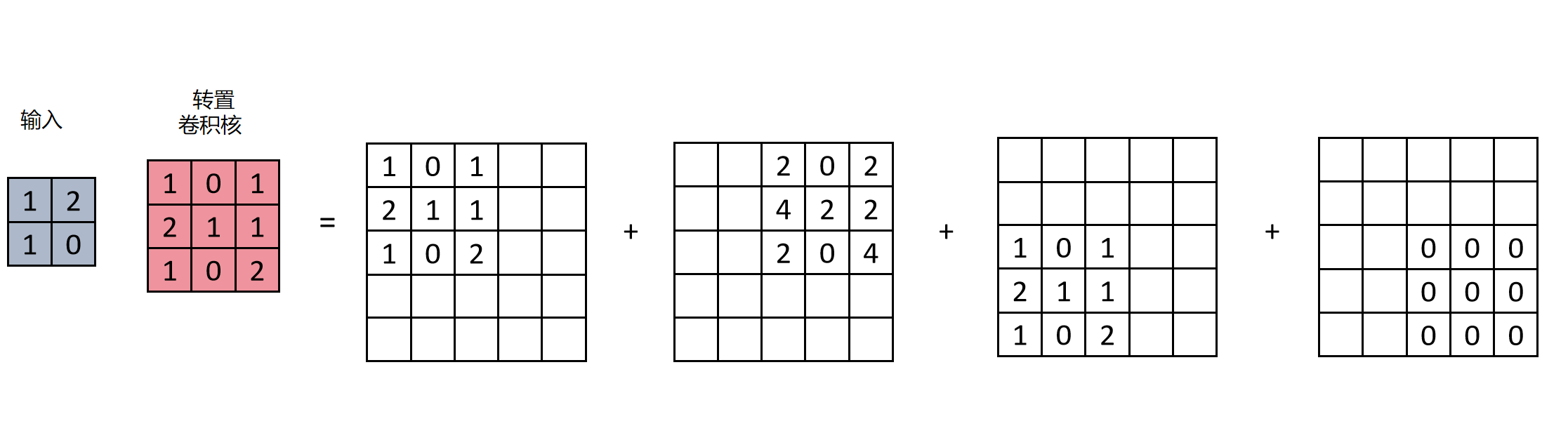
同样,转置卷积的卷积核参数是在训练过程中学到的。通过学习,它知道如何上采样能保持图像的语义信息。
11.9.3 U-Net原理
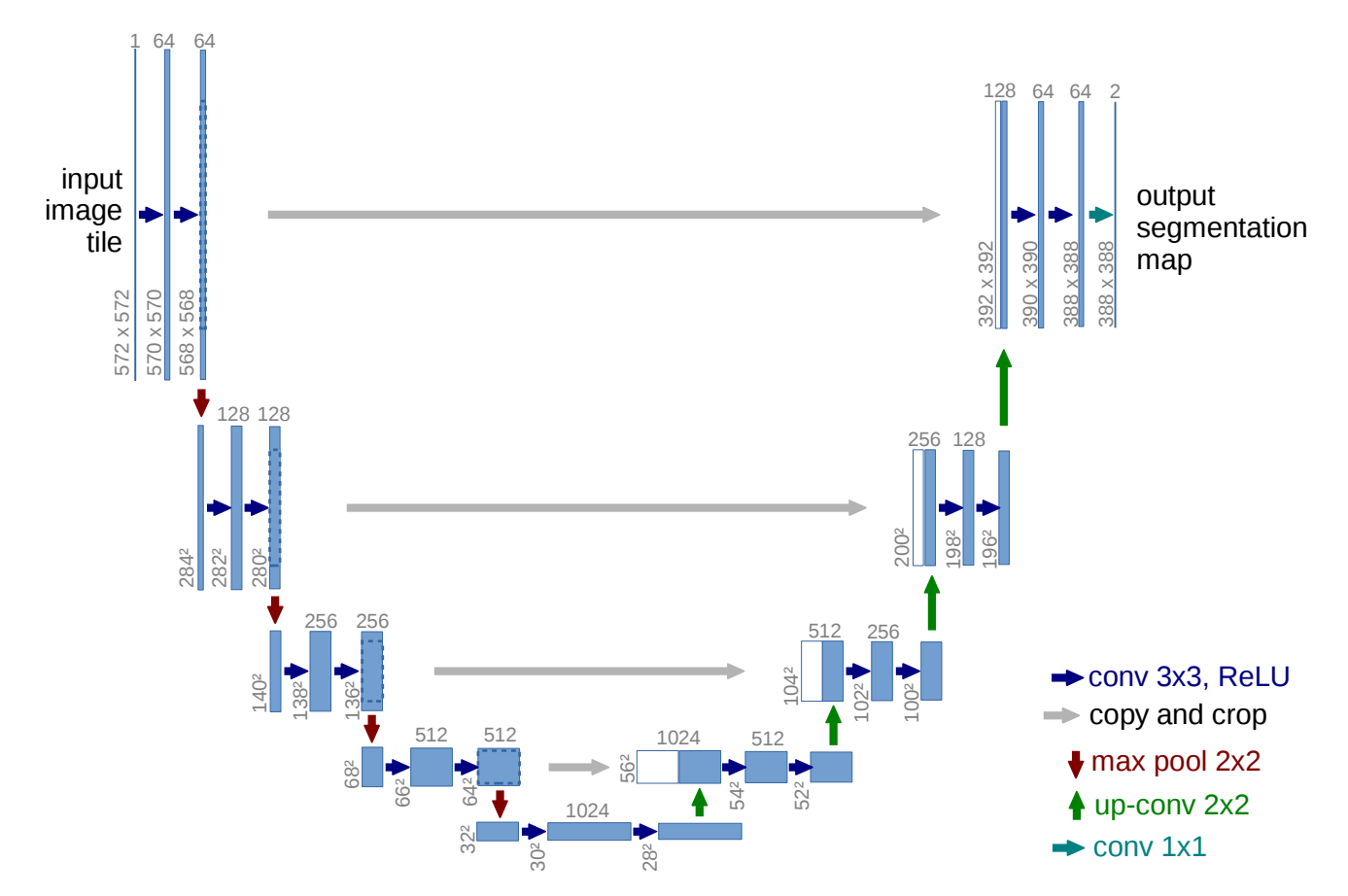 U-Net的网络结构图如上图所示,因为其像字母U,而命名为U-Net。
U-Net 的网络主要分为两个部分:
编码器(Encoder)——下采样路径
解码器(Decoder)——上采样路径
此外还有一条贯穿左右的 跳跃连接(Skip Connections),它是 U-Net 的核心创新之一。
编码器(收缩路径)
编码器类似于传统的卷积神经网络,用于提取图像的特征。它通常由若干个卷积层和最大池化层组成。每一次下采样操作都会减小特征图的空间分辨率,但增加通道数,从而捕捉到更深层次的语义信息。
解码器(扩展路径)
解码器通过上采样操作逐步恢复图像的空间分辨率。每一步中都包括上采样(如反卷积或上采样插值)和卷积操作。其目的是根据高层特征图还原出原图大小的分割结果。
跳跃连接(Skip Connections)
U-Net 的一个关键特点是,它在每个上采样步骤中,把编码器中对应层的特征图与解码器当前的特征图进行拼接(concatenate)。这样可以保留低层的空间信息,使得模型在恢复图像时更加精细。这种跳跃连接机制帮助 U-Net 解决了图像细节信息在下采样过程中丢失的问题。让网络既能“看的懂”,又能“看的清”。
U-Net 的输出
最后一层使用一个 1×1 的卷积操作,将多通道特征图映射为类别数通道。然后使用 softmax 函数进行像素级别的分类。
U-Net的网络结构图如上图所示,因为其像字母U,而命名为U-Net。
U-Net 的网络主要分为两个部分:
编码器(Encoder)——下采样路径
解码器(Decoder)——上采样路径
此外还有一条贯穿左右的 跳跃连接(Skip Connections),它是 U-Net 的核心创新之一。
编码器(收缩路径)
编码器类似于传统的卷积神经网络,用于提取图像的特征。它通常由若干个卷积层和最大池化层组成。每一次下采样操作都会减小特征图的空间分辨率,但增加通道数,从而捕捉到更深层次的语义信息。
解码器(扩展路径)
解码器通过上采样操作逐步恢复图像的空间分辨率。每一步中都包括上采样(如反卷积或上采样插值)和卷积操作。其目的是根据高层特征图还原出原图大小的分割结果。
跳跃连接(Skip Connections)
U-Net 的一个关键特点是,它在每个上采样步骤中,把编码器中对应层的特征图与解码器当前的特征图进行拼接(concatenate)。这样可以保留低层的空间信息,使得模型在恢复图像时更加精细。这种跳跃连接机制帮助 U-Net 解决了图像细节信息在下采样过程中丢失的问题。让网络既能“看的懂”,又能“看的清”。
U-Net 的输出
最后一层使用一个 1×1 的卷积操作,将多通道特征图映射为类别数通道。然后使用 softmax 函数进行像素级别的分类。
需要注意的是U-Net原始论文里进行跳跃连接时,两边特征图的高宽并不一致,需要进行裁剪,这样很麻烦。两边特征图高宽的不一致是因为原论文3×3卷积并没有加Padding,导致特征图尺寸的变化。后来为了方便,实现时大家都利用加Padding的卷积层,保证了跳跃连接时两边特征图高宽的一致。
11.9.4 U-Net实现
import torch
import torch.nn as nn
class DoubleConv(nn.Module):
"""两个连续的 3x3 Conv(padding=1)+ BN + ReLU"""
def __init__(self, in_ch, out_ch):
super().__init__()
self.double_conv = nn.Sequential(
nn.Conv2d(in_ch, out_ch, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch, out_ch, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
)
def forward(self, x):
return self.double_conv(x)
class UNet(nn.Module):
def __init__(self, in_ch, out_ch):
super().__init__()
# 编码路径
self.conv1 = DoubleConv(in_ch, 64)
self.pool1 = nn.MaxPool2d(kernel_size=2)
self.conv2 = DoubleConv(64, 128)
self.pool2 = nn.MaxPool2d(kernel_size=2)
self.conv3 = DoubleConv(128, 256)
self.pool3 = nn.MaxPool2d(kernel_size=2)
self.conv4 = DoubleConv(256, 512)
self.pool4 = nn.MaxPool2d(kernel_size=2)
self.conv5 = DoubleConv(512, 1024) # 最底层
# 解码路径
self.up6 = nn.ConvTranspose2d(1024, 512, kernel_size=2, stride=2) # 上采样 ×2
self.conv6 = DoubleConv(1024, 512) # 拼接后通道数变为 512+512=1024
self.up7 = nn.ConvTranspose2d(512, 256, kernel_size=2, stride=2)
self.conv7 = DoubleConv(512, 256)
self.up8 = nn.ConvTranspose2d(256, 128, kernel_size=2, stride=2)
self.conv8 = DoubleConv(256, 128)
self.up9 = nn.ConvTranspose2d(128, 64, kernel_size=2, stride=2)
self.conv9 = DoubleConv(128, 64)
self.final_conv = nn.Conv2d(64, out_ch, kernel_size=1)
def forward(self, x):
# 编码
c1 = self.conv1(x) # c1: [B, 64, H, W]
p1 = self.pool1(c1) # p1: [B, 64, H/2, W/2]
c2 = self.conv2(p1) # c2: [B,128, H/2,W/2]
p2 = self.pool2(c2) # p2: [B,128, H/4,W/4]
c3 = self.conv3(p2) # c3: [B,256, H/4,W/4]
p3 = self.pool3(c3) # p3: [B,256, H/8,W/8]
c4 = self.conv4(p3) # c4: [B,512, H/8,W/8]
p4 = self.pool4(c4) # p4: [B,512, H/16,W/16]
c5 = self.conv5(p4) # c5: [B,1024,H/16,W/16]
# 解码,第 1 级上采样
u6 = self.up6(c5) # u6: [B,512, H/8,W/8]
# 直接拼接 c4([B,512,H/8,W/8])和 u6
u6 = torch.cat([c4, u6], dim=1) # 拼接后:[B,1024,H/8,W/8]
c6 = self.conv6(u6) # c6: [B,512, H/8,W/8]
# 解码,第 2 级
u7 = self.up7(c6) # u7: [B,256, H/4,W/4]
u7 = torch.cat([c3, u7], dim=1) # [B,512, H/4,W/4]
c7 = self.conv7(u7) # [B,256, H/4,W/4]
# 解码,第 3 级
u8 = self.up8(c7) # [B,128, H/2,W/2]
u8 = torch.cat([c2, u8], dim=1) # [B,256, H/2,W/2]
c8 = self.conv8(u8) # [B,128, H/2,W/2]
# 解码,第 4 级
u9 = self.up9(c8) # [B,64, H, W]
u9 = torch.cat([c1, u9], dim=1) # [B,128,H,W]
c9 = self.conv9(u9) # [B,64, H, W]
# 最后一层 1x1 卷积,得到最终预测
out = self.final_conv(c9) # [B,out_ch,H,W]
return out