2.5 向量叉乘
2.5.1 力矩
我们从一个物理概念来引入向量的叉乘。那就是力矩。
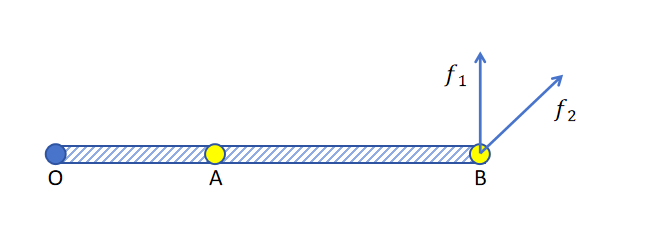
比如上图中,木棍的一端O固定,你要施加一个力来让这个木棍旋转,是A点更容易还是B点更容易呢?有生活经验的你肯定会选择B点。以同样大的力气,沿f1方向让木棍旋转更容易还是沿f2方向让木棍旋转更容易呢?相信你会选择沿f1方向。
物理中描述这种“更容易旋转”的物理量就叫做力矩。力矩与3个因素相关。
力臂的大小
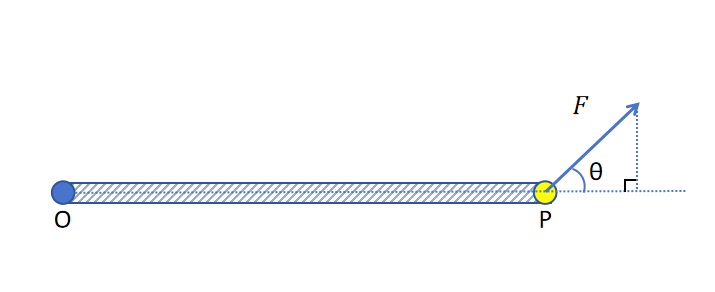
力臂的大小就是旋转点O到力的作用点P之间的长度。相同条件下,力臂越长,力矩越大。旋转越容易。
力的大小
只要力不平行于力臂的方向,相同条件下,力越大,力矩越大。旋转越容易。
力和力臂的角度
力臂大小和力的大小不变的情况下,力和力臂的夹角越接近90°,力矩越大。旋转越容易。而sinθ正好描述了这一关系。sin 0°为0,sin 90°为1。
力矩的定义
所以力矩M的公式为向量P的模长乘以向量F的模长,乘以两个向量夹角的sin值。
M=∣P∣∣F∣sinθ
2.5.2 向量的叉乘
在线性代数里,我们把类似于力矩这种运算叫做叉乘(叉积,向量积)。用符号×表示。
a×b=∣a∣∣b∣sinθ
叉乘的方向
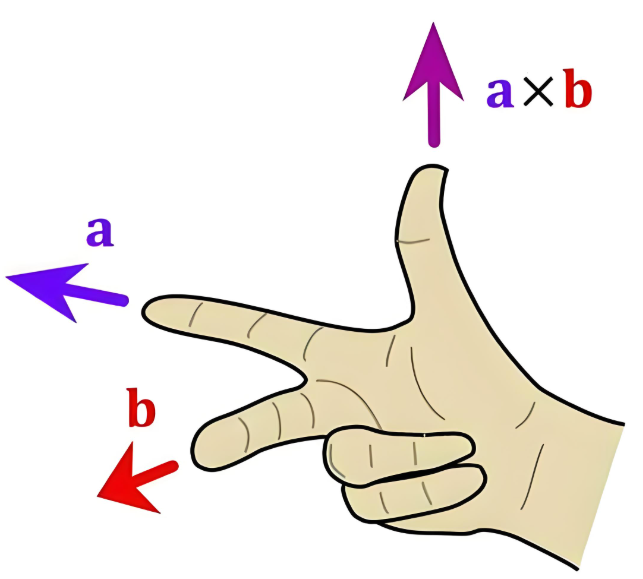
力矩是一个向量,它不光有大小,还有方向。因为力矩描述的是使物体旋转的容易程度。但是旋转有可能是顺指针方向,也有可能是逆时针方向。叉乘也是一个向量,有自己的方向。怎么确定这个方向呢?这就要用的右手法则了。
2.5.3 叉乘的计算法则
根据右手法则,a×b 和b×a的方向是不同的。所以叉乘不满足交换律。
分配率
(a+b)×c=a×c+b×c
c×(a+b)=c×a+c×b
用力矩可以帮助你理解,两个力在同一个力臂上产生的力矩的和等于它们和力的力矩。
数乘结合率
(λa)×b=a×(λb)=λ(a×b)
以力矩来理解,不论力或者力臂变为原来的λ倍,力矩也会变为原来的λ倍。
2.5.4 叉乘的计算公式
有了叉乘的计算法则,我们可以把向量a和b用标准基向量加和的方式来表示,推导出叉乘的计算公式。
a=axi+ayj+azk,b=bxi+byj+bzk
a×b=(axi+ayj+azk)×(bxi+byj+bzk)
利用叉乘分配率有:
a×b=axi×(bxi+byj+bzk)+ayj×(bxi+byj+bzk)+azk×(bxi+byj+bzk)
上式中ax,ay,az,bx,by,bz都为标量,i,j,k为标准基向量。利用数乘结合律有:
a×b=axbx(i×i)+axby(i×j)+axbz(i×k)+aybx(j×i)+ayby(i×j)+
aybz(j×k)+azbx(k×i)+azby(k×j)+azbz(k×k)
根据叉乘的定义,标准基向量和自身叉乘为0,因为sin 0°为0。也就是:
i×i=0
j×j=0
k×k=0
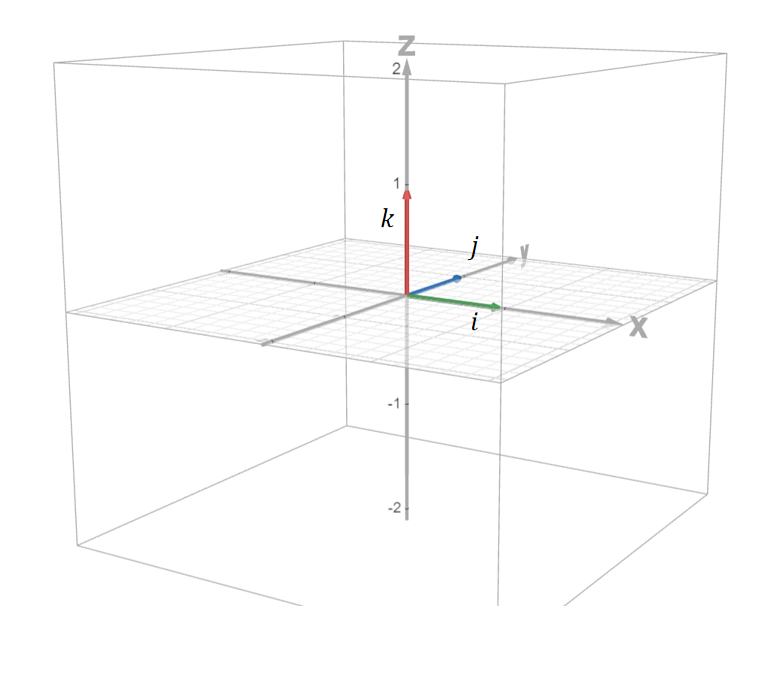
另外,根据叉乘的定义,叉乘的结果为向量,结果向量模长为原始两个向量模长的乘积再乘以它们之间夹角的sin值。方向按照右手法则来确定,垂直于原始两个向量构成的平面。
i×j=k
j×i=−k
j×k=i
k×j=−i
k×i=j
i×k=−j
带入上式,最终得到的结果为:
a×b=(aybz−azby)i+(azbx−axbz)j+(axby−aybx)k
可以看到,最终的结果为一个向量。
2.5.5 叉乘在深度学习里的应用
在深度学习里的优化算法里用到了梯度下降算法,它是训练深度学习算法能通过对数据的学习,调整模型参数的关键。在证明梯度方向是函数值上升最快的方向时,我们会用到叉乘。到时会用两个向量的叉乘来找到一个同时垂直于这两个向量的向量。