17.2 旋转位置编码
之前我们讲过Transformer里使用sin和cos函数生成位置编码,Bert里采用的是可学习位置编码,Llama-1采用了旋转位置编码。在大模型时代越来越多的模型采用了旋转位置编码,今天我们就来一探究竟。
17.2.1 旋转矩阵
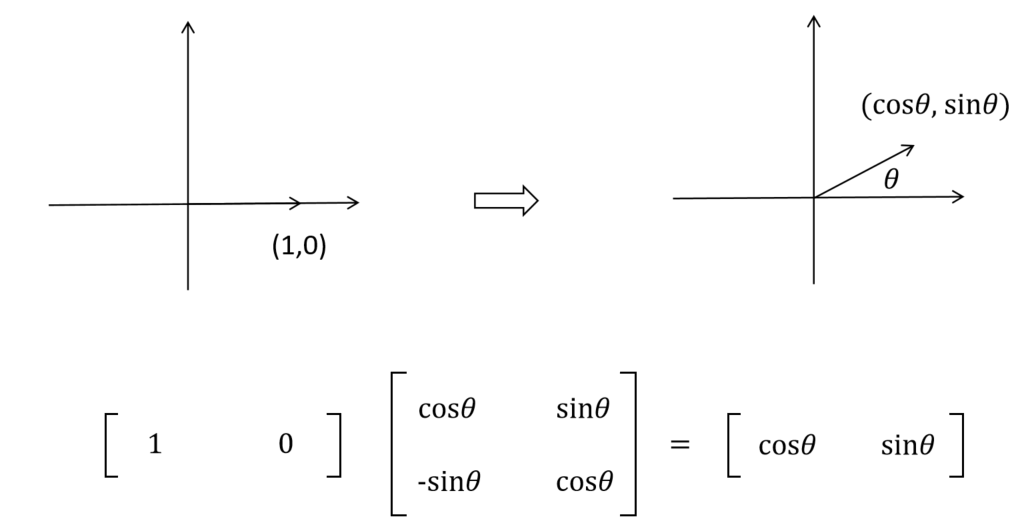
旋转位置编码的核心是通过sin和cos函数构成的旋转矩阵,对二维向量进行旋转。在二维坐标系里,假设一个向量位于x轴上,即向量v=(1,0)。我们希望讲这个向量绕原点旋转一个角度θ。旋转后的向量v′长度保持不变,则其坐标变化为(cosθ,sinθ)。我们定义旋转矩阵R(θ)为:
R(θ)=[cosθ−sinθsinθcosθ]
将向量v与旋转矩阵R(θ)相乘后,结果为(cosθ,sinθ)。
同理,对于位于y轴上的向量v=(0,1),逆时针旋转θ后,得到向量v′=(−sinθ,cosθ)。v′同样等于v与旋转矩阵R(θ)相乘的结果。
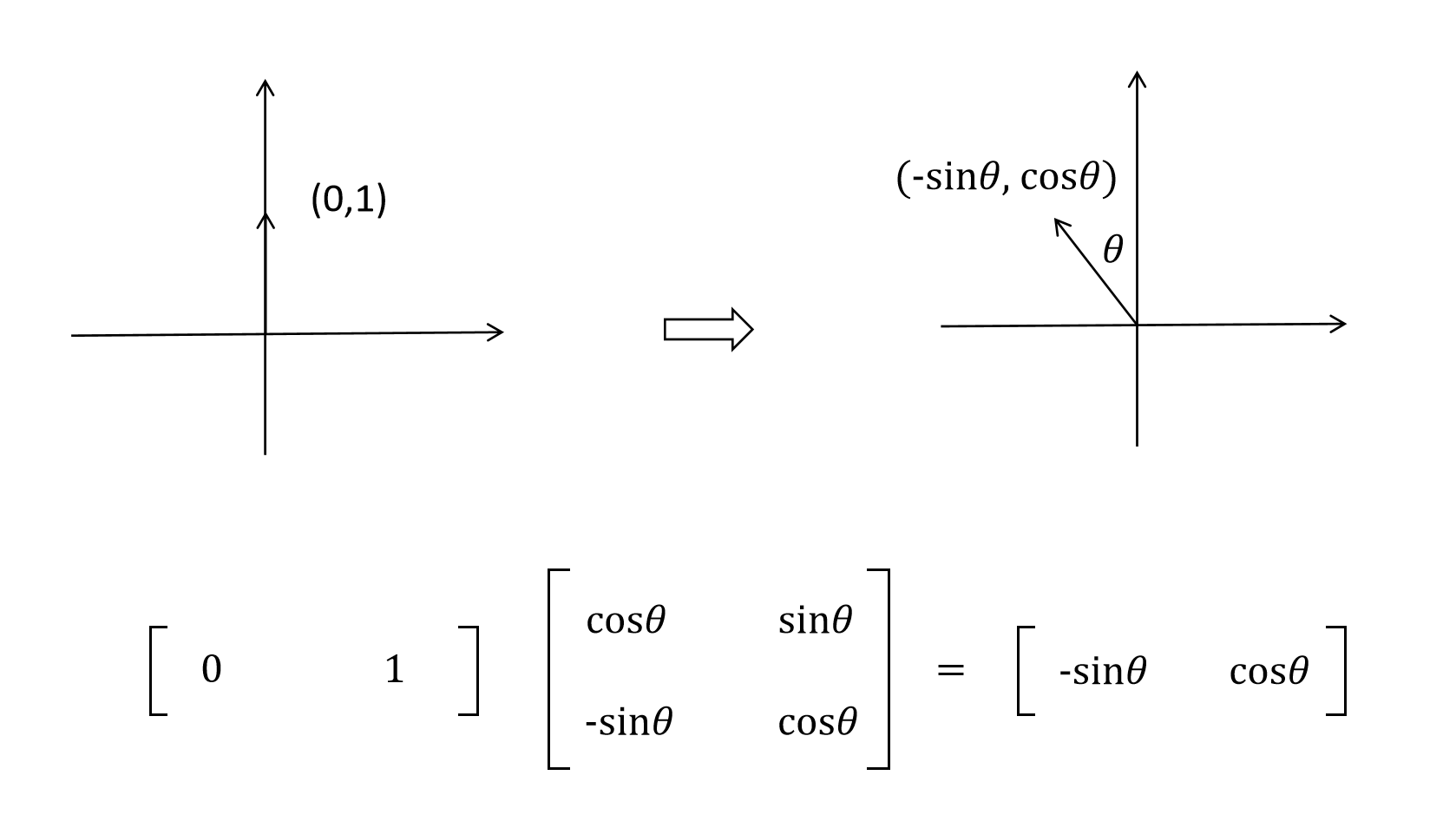
向量(1,0)和向量(0,1)是二维坐标系中的标准基向量。当这两个基向量通过旋转矩阵R(θ)逆时针旋转θ角度时,则等于整个坐标系随之旋转了θ角度。
接下来证明一下旋转矩阵R(θ)可以对任意二维向量进行逆时针旋转θ角度。假设一个向量长度为r,与x轴夹角为α,逆时针旋转β角度。则证明如下:
[rcosαrsinα][cosβ−sinβsinβcosβ]
=[rcosθ∗cosβ−rsinα∗sinβrcosα∗sinβ+rsinα∗cosβ]
[rcos(α+β)rsin(α+β)]
17.2.2 旋转矩阵的性质
旋转矩阵具备以下两个性质:
旋转矩阵具有结合性:
R(θ1)R(θ2)=R(θ1+θ2)
旋转矩阵的转置就是旋转负的θ角度,证明如下:
R(θ)T=[cosθsinθ−sinθcosθ]=[cos(−θ)−sin(−θ)sin(−θ)cos(−θ)]=R(−θ)
其中证明过程中用到了sin和cos的奇偶性:cosθ=cos(−θ)和sin(−θ)=−sinθ
17.2.3 旋转位置编码
在Transformer架构里进行注意力计算时,关键在于计算查询向量q和应答向量k之间的点积。qkT表示两个向量之间的点积,这种计算方式没有直接考虑到token的位置信息。为了引入位置信息,可以通过旋转矩阵对两个向量进行编码来添加位置信息。编码过程为对每个向量根据它们的位置索引(分别为m和n)进行旋转。如果对q应用旋转矩阵R(m),对k应用旋转矩阵R(n),然后再进行点积计算,则有:
qR(m)⋅kR(n)
=qR(m)R(n)TkT
=qR(m)R(−n)kT
=qR(m−n)kT
上边的证明用到了旋转矩阵的两个性质。我们注意到最后得到的注意力表达式里不光含有q,k,还还有m-n这样的相对位置信息。这种相对位置信息可以更好的建模token之间的关系。
17.2.4 拓展到高维
上边讨论的是2维的旋转矩阵,如何扩展到高维呢?答案是将维度两两一组进行旋转,如果q和k的特征长度为8,那么就让特征两两一组,一共4组。每一组在它们两个特征组成的子空间内进行旋转,至于是哪两个特征一组,是无所谓的。任意两个一组都可以。
如下图所示,m代表token的位置,比如一个token在序列里第一个,m就为0。F代表sin()和cos()的系数。在这个公式里,系数最大的是第一个二维子空间,系数为1。系数最大,则波长最短。同理,系数最小的是最后一个二维子空间,系数接近1/10000。系数最小,波长最长。
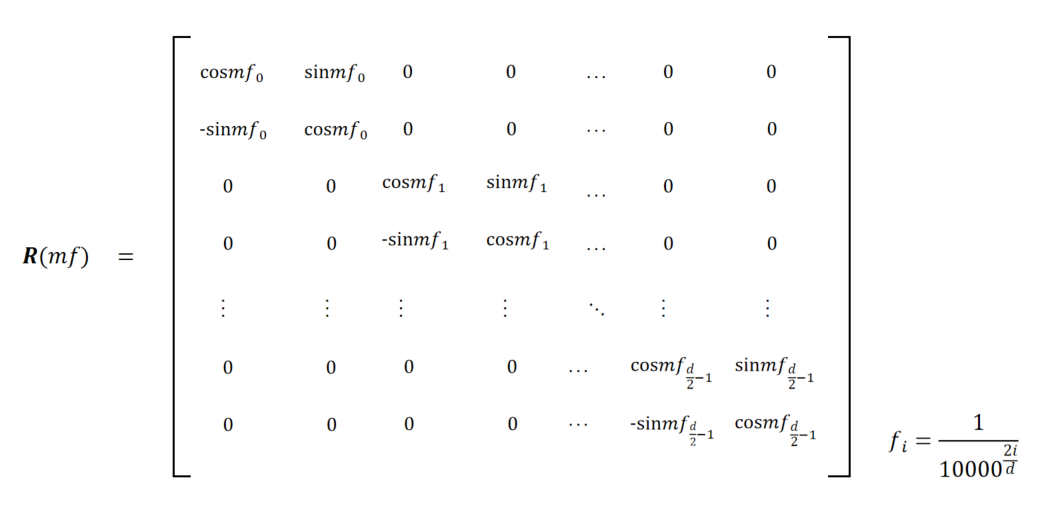
给予不同的二维子空间不同的旋转频率,是因为sin()和cos()都是周期函数。可以通过时钟来理解,频率最快的是秒针,它精准,但是每过一分钟就重复一次。频率最慢的是时针,它频率慢,但不容易重复。秒针,分针和时针一起组合来构成时间。
因为多维旋转矩阵里大部分都是0,token的特征在和多维旋转矩阵相乘时可以简化,其中h是token的特征向量,hi是特征向量第i个位置的值。R(h,m)表示对序列里第m个位置的token的特征向量h进行旋转。
R(h,m)1=[h0,h1,...hd−2,hd−1]⊗[cos(mf0),cos(mf0),..,cos(mf2d−1),cos(mf2d−1)]
R(h,m)2=[−h1,h0,...−hd−1,hd−2]⊗[sin(mf0),sin(mf0),..,sin(mf2d−1),sin(mf2d−1)]
R(h,m)=R(h,m)1+R(h,m)2